Experimental tank facilities
Towing tank for manoeuvres in confined water

 LxBxh 88x7x0.5 m^3
More info available on the website of the Knowledge Centre. Click here.
LxBxh 88x7x0.5 m^3
More info available on the website of the Knowledge Centre. Click here.
Towing tank for manoeuvres in shallow water

 LxBxh 175x20x1 m^3
More info available on the website of the Knowledge Centre. Click here.
LxBxh 175x20x1 m^3
More info available on the website of the Knowledge Centre. Click here.
 LxBxh 30x30x1.4 m^3
Click
LxBxh 30x30x1.4 m^3
Click Simulators
The Maritime Technology Division of UGent uses the two maritime simulators (SIM360+ and SIM225) and one inland simulator (LARA) owned and developed by Flanders Hydraulics (FH) to conduct accessibility studies. Those simulators include the following mathematical manoeuvring model:- calculation of hydrodynamic forces, shallow water effects, restricted (confined) water effects;
- propulsion;
- aerodynamic forces;
- contact forces and interaction with encountering and overtaking target vessels;
- effects of wind, waves and current.;
Software
The Maritime Technology Division uses many different software tools to support the work which is performed at a daily basis at the University. These are commercial codes, as well as tools developed as a result of specific (Research) projects, which are used to perform specialised, fundamental research. In-house packages are described in detail, referring to published studies, in case more information regarding content and application of the codes is desired. Do not hesitate to contact us. The Maritime Technology Division has developed several software codes, which are being used for project specific needs and for fundamental research. All codes are in continuous development, extending the code with specific features. Whenever test data are available, the software packages are validated extensively.MOORDYN: Anchoring of floating objects to the seabed
Introduction
 In the framework of the EDULIS project, a mathematical model is needed to simulate the behaviour of mussel line systems under the effect of environmental loads such as waves and currents. After a preliminary study, the Maritime Technology Division of UGent (MTD) decided to develop an in-house code for this project. The starting point for the development of the new code was the open source software MoorDyn [1], originally developed to predict the dynamics of submerged moored systems. The open source nature of MoorDyn allowed MTD to customize the code according to the needs of the EDULIS project. Numerous modifications and improvements were made to the original software to enhance its capabilities.
In the framework of the EDULIS project, a mathematical model is needed to simulate the behaviour of mussel line systems under the effect of environmental loads such as waves and currents. After a preliminary study, the Maritime Technology Division of UGent (MTD) decided to develop an in-house code for this project. The starting point for the development of the new code was the open source software MoorDyn [1], originally developed to predict the dynamics of submerged moored systems. The open source nature of MoorDyn allowed MTD to customize the code according to the needs of the EDULIS project. Numerous modifications and improvements were made to the original software to enhance its capabilities.
Original MoorDyn code
 The original MoorDyn code was developed by Matthew Hall and made available through the GitHub platform. This code was conceived to simulate the behaviour of moored systems in the time domain by using a simple lumpedmass approach to model mooring lines and the Morison equation to model the hydrodynamic forces acting on the system components[2]. In a lumpedmass approach, each line is divided into a discrete number of segments, whose physical properties are concentrated in points called nodes. Each node is subject to half of the forces and weight transferred from the two segments on each side. At each time step, acceleration of each node is computed by summing up all the calculated forces. The velocity and position of each node are computed by employing second order Runge-Kutta integration scheme [2]. At the end of a time step, each node has a new position, representing the new position of each of the contiguous segments. This translates into a new position of the whole mooring line system. In the original code, the moored system had to be attached to moving objects (fairleads), whose motions were to be provided in an input file or to be calculated by a complementary code in a coupled simulation. Two versions of the original MoorDyn code exist, one written in C++ and one in modern Fortran. The latter was used by MTD as the starting point for the development of the new numerical tool to be used for the EDULIS project.
The original MoorDyn code was developed by Matthew Hall and made available through the GitHub platform. This code was conceived to simulate the behaviour of moored systems in the time domain by using a simple lumpedmass approach to model mooring lines and the Morison equation to model the hydrodynamic forces acting on the system components[2]. In a lumpedmass approach, each line is divided into a discrete number of segments, whose physical properties are concentrated in points called nodes. Each node is subject to half of the forces and weight transferred from the two segments on each side. At each time step, acceleration of each node is computed by summing up all the calculated forces. The velocity and position of each node are computed by employing second order Runge-Kutta integration scheme [2]. At the end of a time step, each node has a new position, representing the new position of each of the contiguous segments. This translates into a new position of the whole mooring line system. In the original code, the moored system had to be attached to moving objects (fairleads), whose motions were to be provided in an input file or to be calculated by a complementary code in a coupled simulation. Two versions of the original MoorDyn code exist, one written in C++ and one in modern Fortran. The latter was used by MTD as the starting point for the development of the new numerical tool to be used for the EDULIS project.
New features
In the current modifications, the code can be run as a stand-alone software to predict mooring lines behaviour under environmental loads induced by current, regular and irregular waves. Since the beginning of the project, the following new features have been introduced:- Capability of running as a standalone tool: the moored system state evolves under environmental loads without the need to provide externally calculated motions for the fairleads.
- Simple buoys: free to move in the 3 translational degrees of freedom and subject to own weight, buoyancy, forces from connected lines and hydrodynamic forces according to Morison equation.
- Clump weights: connection elements which can be used as anchoring connections, to test their motions when the system is subject to environmental loads.
- Current induced environmental loads: different conditions can be specified in terms of current speed at a reference quote, current direction and type of vertical profile (constant, linear, power law).
- Environmental loads induced by regular wave trains: the system reacts to both changes in the free surface and wave induced kinematic fields (orbital velocities and accelerations). Different conditions can be specified in terms of amplitude, direction and period of a regular Airy wave.
- Environmental loads induced by irregular waves: A directional wave spectrum is used as an input and a specific realization of the sea state is calculated by applying random phases to each of the elementary regular wave components. The total loads on the moored system is calculated by the superposition principle.
- Bottom friction: friction forces are experienced by lines and connection objects (buoys, clump weights) when touching the bottom. The friction forces are modelled through the definition of static and dynamic friction coefficients.
- Capability to update the current magnitude, free surface elevation and current direction throughout the simulation to which is useful when simulating a tidal cycle.
- Build up stage to ramp up wave and current loads.
- A tool to plot the state of the moored system in 3D with the additions of 2D plots for the yz-plane and xz-plane showing how the system is evolving in time.
- Visualization tool showing time series of hydrodynamic forces, tension forces and strain of line segments.
- Graphical User Interface (GUI) is available to setup an input file, preview configuration and run the solver.
Installation in waves (time span less than a minute) and another installation in current (time span of 13 hours)
VLUGMOOR: Simulating the behaviour of moored vessels
Description

Code specification
The code is at the moment exclusively used by the department, to perform mooring studies and research. The software is written in MATLAB language, using object oriented programming to make the code easy to rewrite in other computer languages. The advantage of this using this self-developed package is that it can be easily operated and modified, making it possible to include new modules to the code. The code is at the moment being fully overhauled as part of a PhD thesis.Validation
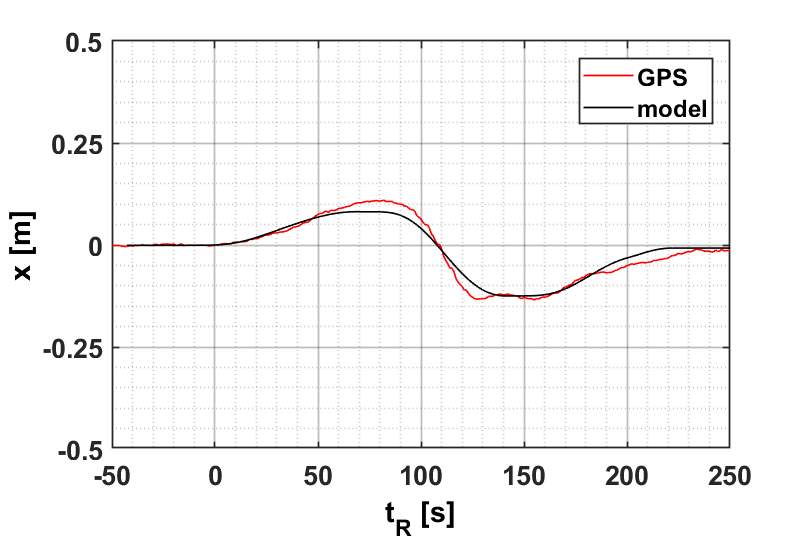
The software has been validated successfully for passing ship effects, based on full-scale measurements performed at the port of Antwerp. Some of the results have been published at the PIANC World Conference 2018 in Panama [2]. The figures are taken from the referred paper, with on the left passing event at the North Sea Terminal in the port of Antwerp and on the right the surge motion of the moored vessel during the passing event, with a comparison between measured (GPS) and modelled motions. With the further development of the code, more validation work is planned in the near future.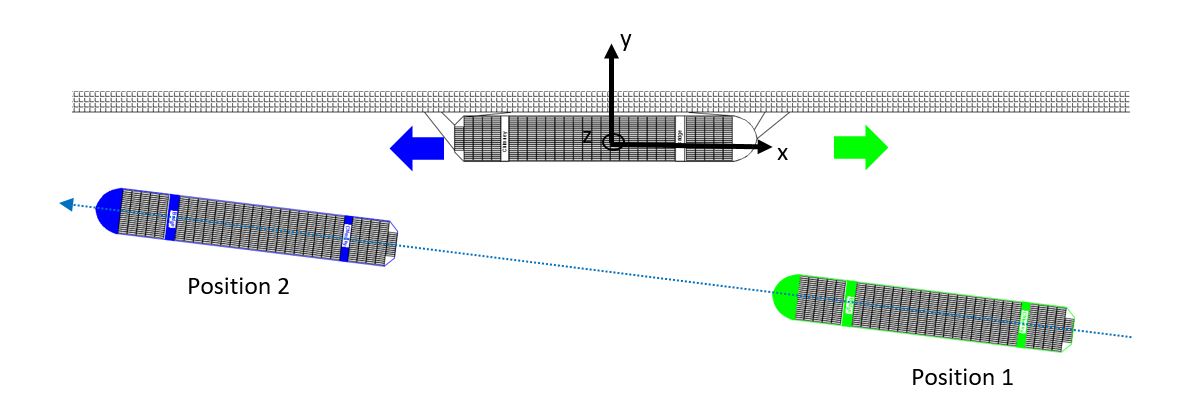
 [2] Van Zwijnsvoorde, T.; Vantorre, M; Ides, S, 'Container ships moored at the port of Antwerp : Modelling response to passing vessels',
PIANC World Congress Panama City, 2018
[2] Van Zwijnsvoorde, T.; Vantorre, M; Ides, S, 'Container ships moored at the port of Antwerp : Modelling response to passing vessels',
PIANC World Congress Panama City, 2018
Specific features
The code is not limited to only calculating time series of line forces and motions, it also allows post-processing, which can be finetuned to match project needs. For forces and motions due to cyclic wave action for example, the time series are converted to the frequency domain, to allow the calculation of significant and most probable maximum forces and motions, as well to identify possible resonance in the mooring system.RIVSEA : Risk analysis estuary vessel at sea
 Inland vessels are a key component in the connection between a (coastal) port and the hinterland. A good inland connection is not always available. In these cases, it might be opportunistic to perform a limited sea journey, under strict conditions, with well-equipped inland vessels. In Belgium, such traffic exists between the port of Zeebrugge and the mouth of the river Scheldt, allowing these so-called estuary vessels to reach Antwerp and travel further to neighboring countries. This is regulated by the Royal Decree for sea-going inland vessels [3]. According to this regulation, all inland vessels who want to perform estuary studies need to undergo a probabilistic sea-keeping analysis. Rivsea allows to calculate the response in waves of vessels, based on which a operational significant wave height is defined, by imposed risk limitations imposed by the Royal Decree.
Inland vessels are a key component in the connection between a (coastal) port and the hinterland. A good inland connection is not always available. In these cases, it might be opportunistic to perform a limited sea journey, under strict conditions, with well-equipped inland vessels. In Belgium, such traffic exists between the port of Zeebrugge and the mouth of the river Scheldt, allowing these so-called estuary vessels to reach Antwerp and travel further to neighboring countries. This is regulated by the Royal Decree for sea-going inland vessels [3]. According to this regulation, all inland vessels who want to perform estuary studies need to undergo a probabilistic sea-keeping analysis. Rivsea allows to calculate the response in waves of vessels, based on which a operational significant wave height is defined, by imposed risk limitations imposed by the Royal Decree.
Description
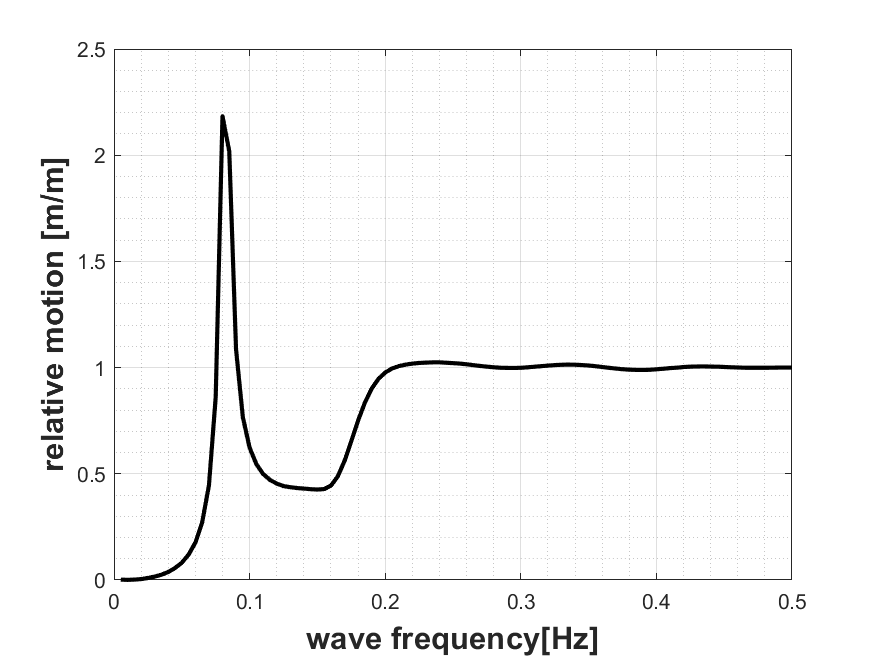
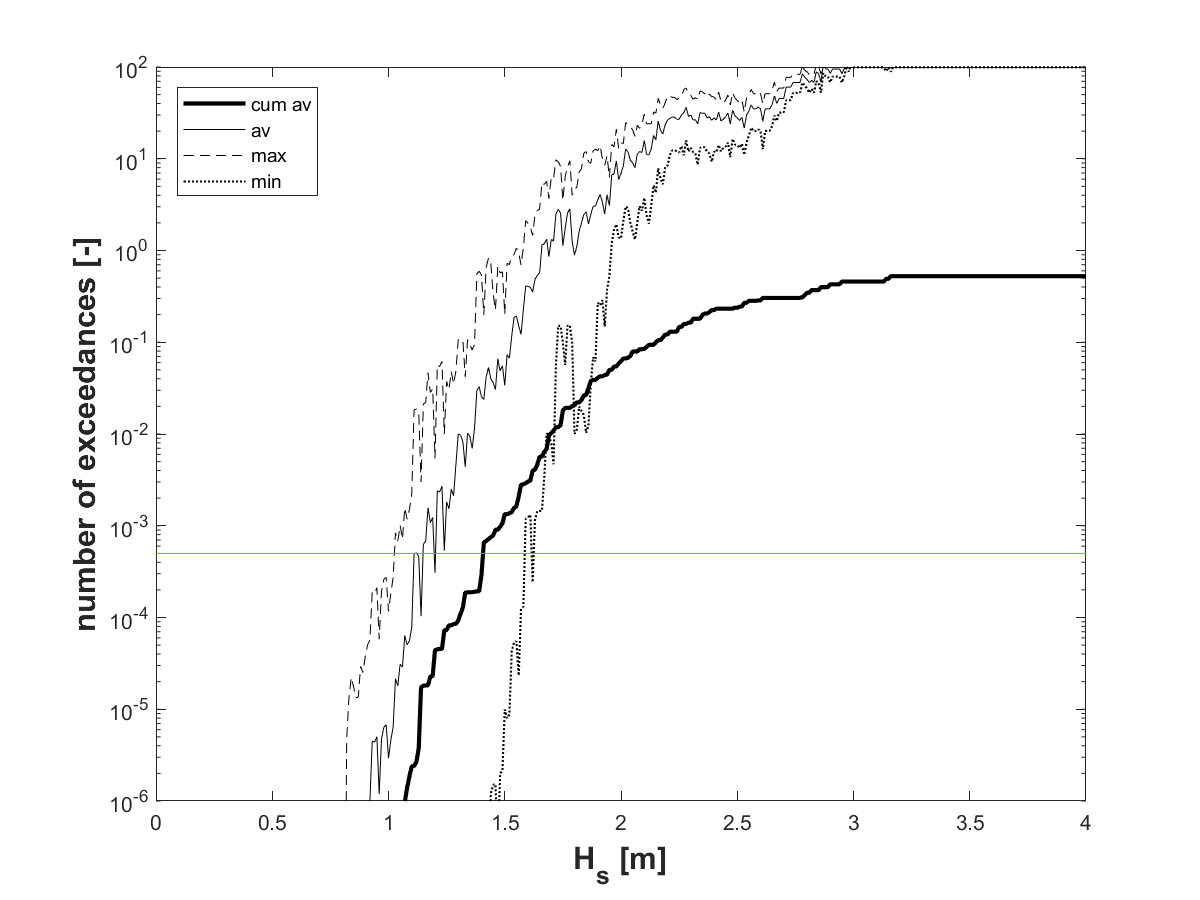
The Rivsea code is used to evaluate the risk of a inland vessel performing a sea journey. This is done according to the procedure outlined in [3] In a first step, the response of the vessel to incoming waves is calculated, based on the wave climate specification and the ship's response function (RAO). This is done for a representative period (e.g. 1 year measurement, with wave data every 2h), based on which the total number of exceedances of a given threshold response is calculated. Based on this risk assessment, the significant wave height up to which the vessel can operate is determined [4]. The figures show a spectral distribution of wave energy (left) and the ship response (RAO) to a unity wave height (center). The right figure shows the result of the risk analysis, giving a significant wave height up to which the vessel can operate. In this publication, a review of the sea-keeping analysis in the current legislation is given.[5] [3] FOD, 'Koninklijk besluit betreffende binnenschepen die ook voor niet-internationale zeereizen kunnen worden gebruikt', Staatsblad 2013 [Dutch] [4] Vantorre, M.; Eloot, K.; Delefortrie, G., 'Probabilistic regulation for inland vessels operating at Sea as an alternative hinterland connection for coastal harbours', EJTIR, 2012 [5] Donatini, L. et al.,'Belgian Royal Decree for sea-going inland vessels, a review for container and bulk cargo vessels', Pianc World Congress Panama City, 2018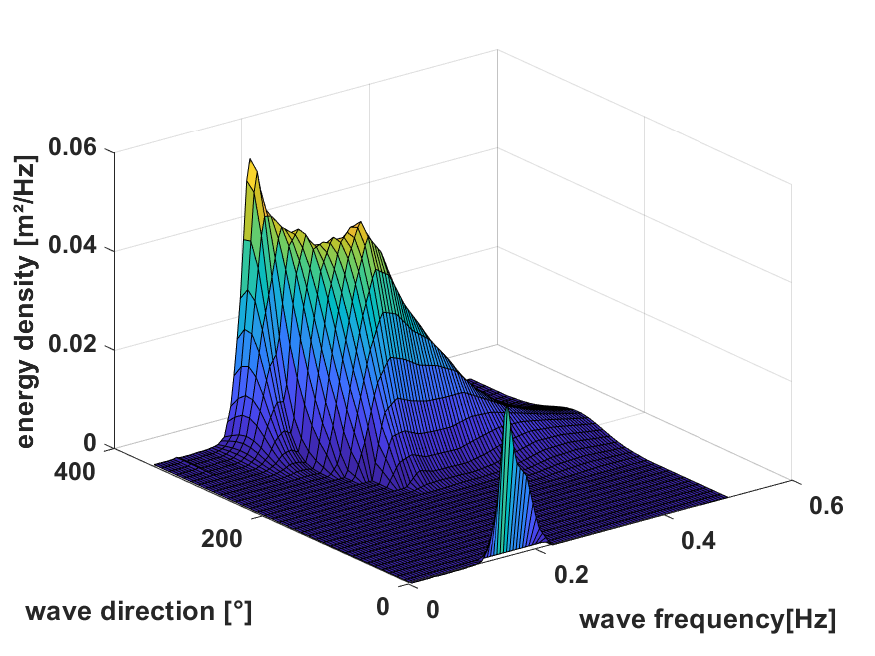
Code specification
The calculation of ship responses for large data sets is performed using MATLAB, which is very efficient to handle large data matrices, performing calculations based on matrix manipulations. The code is written in a flexible way, where the core calculation core is written separately from the in- and output generation modules. This means that wave data can be imported from various locations, being either numerical hindcast results or measured wave data, and converted to the required input format. The software is suited to calculate the response for different variables (bending moment, relative motion) at different locations in a fast and efficient way, allowing to perform risk studies for a design vessel within acceptable time.Specific features
The main advantages of the code are that it can handle different input wave sources and that it allows flexibility in the calculation. Next to the default calculation where the significant wave height is calculated up to which a vessel can operate, the need strength/freeboard can also be calculated for a target significant wave height, allowing to give valuable input to ship design.Typhoon
Description
Typhoon is an open source free and easy to use software in which you can calculate any hydrofoil design. You get:

- static force and moment calculation giving you forces, moments, as well as the overall lift and drag you get for a predefined forward speed, trim and elevation.
- static equilibrium calculation (Newton Rhapson) gives you the trim and elevation which results in an equilibrium vertical force and moment around Y (external forces are assumed to be constant). For example, if more lift is needed for your mass, the trim will increase and/or your foils go deeper in the water (resulting in higher lift forces). The forces and moments you get are net forces so almost zero.
- stability matrix indicating if the foiling ship is stable: If you give it a kick will it return to an equilibrium or get a nice splash? You need to like eigen values.
Please log on to the dedicated Typhoon website for more details about the code and tutorials on how to run it.
Happy foiling!